1
GATE ECE 2008
MCQ (Single Correct Answer)
+2
-0.6
A signal flow graph of a system is given below.
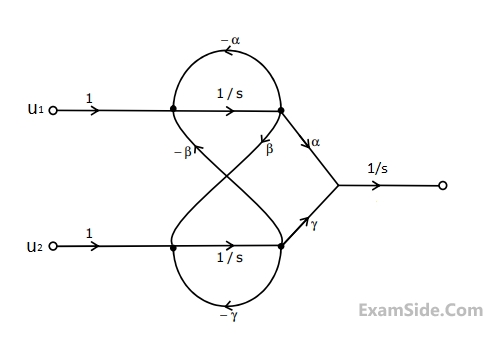
The set of equations that correspond to this signal flow graph is
2
GATE ECE 2007
MCQ (Single Correct Answer)
+2
-0.6
Consider a linear system whose state space Representation is $$\mathop x\limits^ \bullet \left( t \right) = AX\left( t \right).$$
If the initial state vector of the system is $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 2} \cr } } \right],$$
then the system response is $$x\left( t \right) = \left[ {\matrix{ {{e^{ - 2t}}} \cr { - 2{e^{ - 2t}}} \cr } } \right].$$
If the initial state vector of the system changes to $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 1} \cr } } \right],$$
then the system response becomes $$x\left( t \right) = \left[ {\matrix{ {{e^{ - t}}} \cr { - {e^{ - t}}} \cr } } \right].$$
If the initial state vector of the system is $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 2} \cr } } \right],$$
then the system response is $$x\left( t \right) = \left[ {\matrix{ {{e^{ - 2t}}} \cr { - 2{e^{ - 2t}}} \cr } } \right].$$
If the initial state vector of the system changes to $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 1} \cr } } \right],$$
then the system response becomes $$x\left( t \right) = \left[ {\matrix{ {{e^{ - t}}} \cr { - {e^{ - t}}} \cr } } \right].$$
The system matrix a is
3
GATE ECE 2007
MCQ (Single Correct Answer)
+2
-0.6
The state space representation of a separately excited DC servo motor dynamics is given as
$$$\left[ {\matrix{
{{{d\omega } \over {dt}}} \cr
{{{d{i_a}} \over {dt}}} \cr
} } \right] = \left[ {\matrix{
{ - 1} & 1 \cr
{ - 1} & { - 10} \cr
} } \right]\left[ {\matrix{
\omega \cr
{{i_a}} \cr
} } \right] + \left[ {\matrix{
0 \cr
{10} \cr
} } \right]u.$$$
Where 'ω' is the speed of the motor, 'ia' is the armature current and u is the armature voltage. The transfer function $${{\omega \left( s \right)} \over {U\left( s \right)}}$$ of the motor is
4
GATE ECE 2007
MCQ (Single Correct Answer)
+2
-0.6
Consider a linear system whose state space Representation is $$\mathop x\limits^ \bullet \left( t \right) = AX\left( t \right).$$
If the initial state vector of the system is $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 2} \cr } } \right],$$
then the system response is $$x\left( t \right) = \left[ {\matrix{ {{e^{ - 2t}}} \cr { - 2{e^{ - 2t}}} \cr } } \right].$$
If the initial state vector of the system changes to $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 1} \cr } } \right],$$
then the system response becomes $$x\left( t \right) = \left[ {\matrix{ {{e^{ - t}}} \cr { - {e^{ - t}}} \cr } } \right].$$
If the initial state vector of the system is $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 2} \cr } } \right],$$
then the system response is $$x\left( t \right) = \left[ {\matrix{ {{e^{ - 2t}}} \cr { - 2{e^{ - 2t}}} \cr } } \right].$$
If the initial state vector of the system changes to $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 1} \cr } } \right],$$
then the system response becomes $$x\left( t \right) = \left[ {\matrix{ {{e^{ - t}}} \cr { - {e^{ - t}}} \cr } } \right].$$
The eigen value and eigen vector pairs $$\left( {{\lambda _{i,}}{V_i}} \right)$$ for the system are
GATE ECE Subjects
Browse all chapters by subject
Network Theory
Control Systems
Electronic Devices and VLSI
Analog Circuits
Digital Circuits
Microprocessors
Signals and Systems
Discrete Fourier Transform and Fast Fourier Transform Discrete Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Fourier Transform Representation of Continuous Time Signal Fourier Series Transmission of Signal Through Continuous Time LTI Systems Miscellaneous Sampling Continuous Time Linear Invariant System Discrete Time Linear Time Invariant Systems Discrete Time Signal Z Transform Transmission of Signal Through Discrete Time Lti Systems
Communications
Electromagnetics
General Aptitude