State Space Analysis · Control Systems · GATE ECE
Marks 1
Where u(t) denotes the unit step function.
The value of $$\mathop {Lt}\limits_{x \to \infty } \left| {\sqrt {{x_1}^2\left( t \right) + {x_2}^2\left( t \right)} } \right|$$ is ______
where p and q are arbitrary real numbers. Which of the following statesments about the controllability of the system is true?
$$\mathop x\limits^ \bullet $$(t) = -2x(t)+2u(t)
y(t) = 0.5x(t) is
Marks 2
The state and output equations for a control system are:
$$ \begin{aligned} & \dot{x}=\left[\begin{array}{cc} -4 & -1.5 \\ 4 & 0 \end{array}\right] x+\left[\begin{array}{l} 2 \\ 0 \end{array}\right] u \\ & y=\left[\begin{array}{ll} 1.5 & 0.625 \end{array}\right] x \end{aligned} $$
Which of the following expressions correctly represents the transfer function $\frac{Y(s)}{U(s)}$ of the system with zero initial conditions?
Consider a system where $x_1(t), x_2(t)$, and $x_3(t)$ are three internal state signals and $u(t)$ is the input signal. The differential equations governing the system are given by
$$ \frac{d}{d t}\left[\begin{array}{l} x_1(t) \\ x_2(t) \\ x_3(t) \end{array}\right]=\left[\begin{array}{ccc} 2 & 0 & 0 \\ 0 & -2 & 0 \\ 0 & 0 & 0 \end{array}\right]\left[\begin{array}{l} x_1(t) \\ x_2(t) \\ x_3(t) \end{array}\right]+\left[\begin{array}{l} 1 \\ 1 \\ 1 \end{array}\right] u(t) $$
Which of the following statements is/are TRUE?
Consider a system $S$ represented in state space as
$$\frac{dx}{dt} = \begin{bmatrix} 0 & -2 \\ 1 & -3 \end{bmatrix}x + \begin{bmatrix} 1 \\ 0 \end{bmatrix}r , \quad y = \begin{bmatrix} 2 & -5 \end{bmatrix}x.$$
Which of the state space representations given below has/have the same transfer function as that of $S$?
The electrical system shown in the figure converts input source current $i_s(t)$ to output voltage $\theta_O(t)$.
 Current $i_L(t)$ in the inductor and voltage $\vartheta_C(t)$ across the capacitor ate taken as the state variables, both assumed to be initially equal to Zero, i.e., $i_L(0)=0$ and $\vartheta_c(0)=0$. The system is
Current $i_L(t)$ in the inductor and voltage $\vartheta_C(t)$ across the capacitor ate taken as the state variables, both assumed to be initially equal to Zero, i.e., $i_L(0)=0$ and $\vartheta_c(0)=0$. The system is
$$\mathop x\limits^. = \left[ {\matrix{ { - 4} & { - 1.5} \cr 4 & 0 \cr } } \right]x + \left[ {\matrix{ 2 \cr 0 \cr } } \right]u,$$
$$y = \left[ {\matrix{ {1.5} & {0.625} \cr } } \right]x.$$
The transfer function representation of the system is
When x1(t) and x2(t) are the two state variables and r(t) denotes the input. The output c(t)=X1(t). The systyem is
Where x1(t), then the system is
the transfer function H(s)$$\left[ { = {{Y\left( s \right)} \over {U\left( s \right)}}} \right]is$$
The response y(t) is
For $${x_0} = \left[ {\matrix{ 1 \cr { - 1} \cr } } \right],x\left( t \right) = \left[ {\matrix{ {{e^{ - t}}} \cr { - {e^{ - t}}} \cr } } \right]$$ and for $${x_0} = \left[ {\matrix{ 0 \cr 1 \cr } } \right],x\left( t \right) = \left[ {\matrix{ {{e^{ - t}}} & { - {e^{ - 2t}}} \cr { - {e^{ - t}}} & { + 2{e^{ - 2t}}} \cr } } \right]$$ when $${x_0} = \left[ {\matrix{ 3 \cr 5 \cr } } \right],x\left( t \right)$$ is
If the initial conditions are x1(0)= 1 and x2(0)=-1, the solution of the state equation is
The corresponding system is
The system is
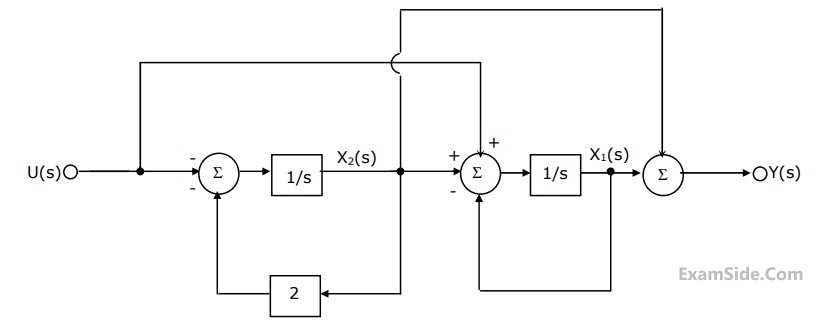
The state transition matrix eAt of the system shown in the figure above is
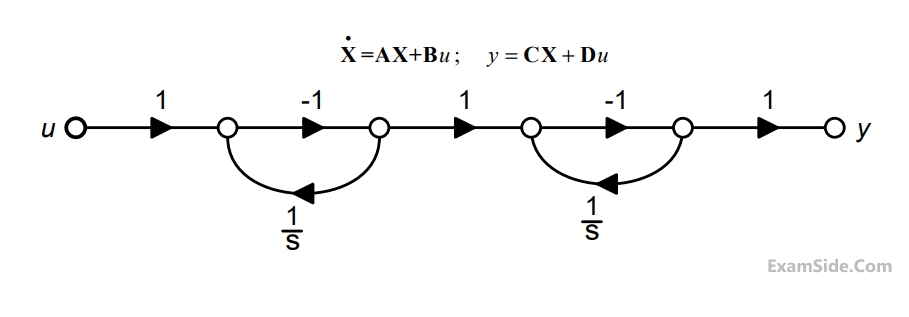
The state-variable equations of the system shown in the figure above are
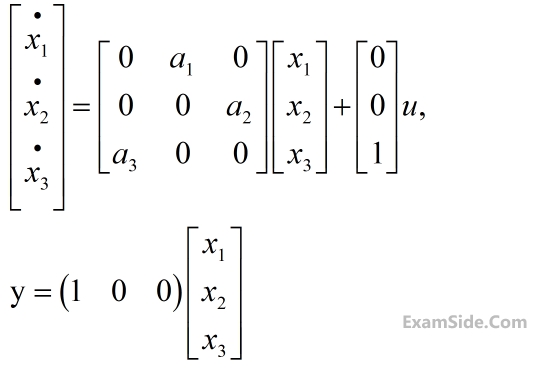
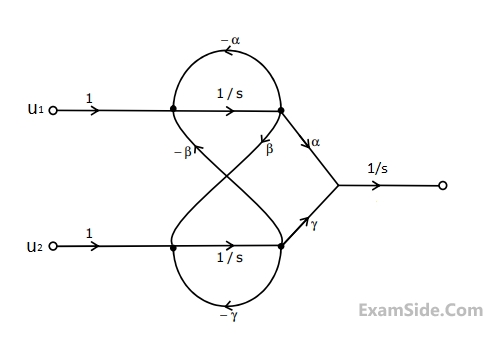
where y is the output and u is input. The system is controllable for
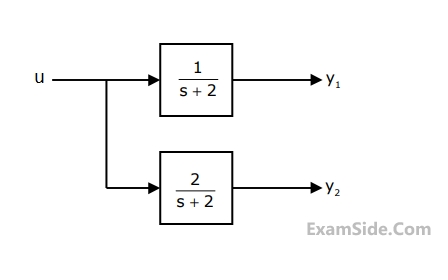
A state space model of the above system in terms of the state vector $$\underline x $$ and the output vector $$\underline y = {\left[ {\matrix{ {{y_1}} & {{y_2}} \cr } } \right]^\tau }$$ is
The state variable representation of the system can be
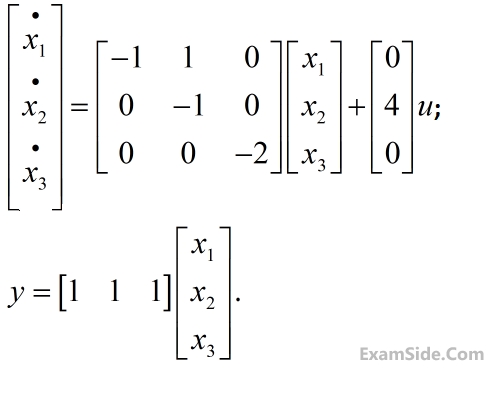
The transfer function of the system is
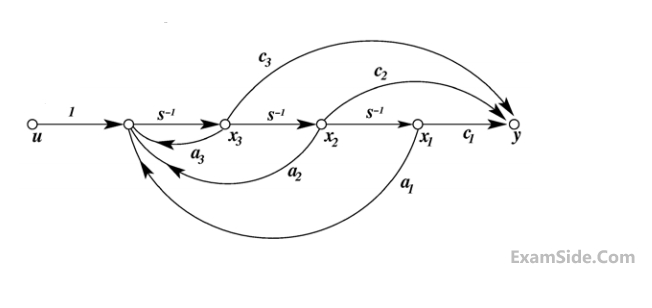
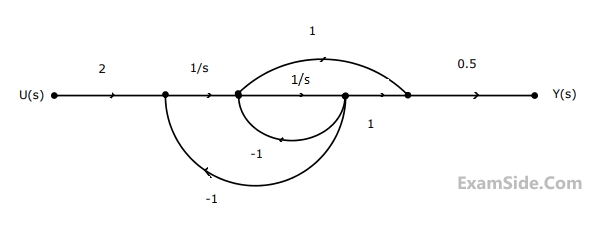
The set of equations that correspond to this signal flow graph is
If the initial state vector of the system is $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 2} \cr } } \right],$$
then the system response is $$x\left( t \right) = \left[ {\matrix{ {{e^{ - 2t}}} \cr { - 2{e^{ - 2t}}} \cr } } \right].$$
If the initial state vector of the system changes to $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 1} \cr } } \right],$$
then the system response becomes $$x\left( t \right) = \left[ {\matrix{ {{e^{ - t}}} \cr { - {e^{ - t}}} \cr } } \right].$$
The system matrix a is
If the initial state vector of the system is $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 2} \cr } } \right],$$
then the system response is $$x\left( t \right) = \left[ {\matrix{ {{e^{ - 2t}}} \cr { - 2{e^{ - 2t}}} \cr } } \right].$$
If the initial state vector of the system changes to $$x\left( 0 \right) = \left[ {\matrix{ 1 \cr { - 1} \cr } } \right],$$
then the system response becomes $$x\left( t \right) = \left[ {\matrix{ {{e^{ - t}}} \cr { - {e^{ - t}}} \cr } } \right].$$
The eigen value and eigen vector pairs $$\left( {{\lambda _{i,}}{V_i}} \right)$$ for the system are
Where 'ω' is the speed of the motor, 'ia' is the armature current and u is the armature voltage. The transfer function $${{\omega \left( s \right)} \over {U\left( s \right)}}$$ of the motor is
The state-transition matrix of the system is
The system is
If the control signal u is given by u=(-0.5-3-5)x+v, then the eigen values of the closed loop system will be
Where x1(t) and x2(t) are the state variables and u (t) is the control variable. The system is
Marks 5
 (a) Write down the state variable equations for the system in matrix form
assuming the state vector to be $${\left[ {{x_1}\left( t \right)\,\,{x_2}\left( t \right)} \right]^T}$$
(a) Write down the state variable equations for the system in matrix form
assuming the state vector to be $${\left[ {{x_1}\left( t \right)\,\,{x_2}\left( t \right)} \right]^T}$$
(b) Find out the state transition matrix.
(c) Determine y(t), t ≥ 0, when the initial values of the state at time t = 0 are $${x_1}$$(0) = 1, and $${x_2}$$(0) = 1.
(a) Find the eigen values (natural frequencies) of the system.
(b)If u(t)=$$\delta \left( t \right)$$ and x1(0+)=x2(0+)=0, find x1(t),x2(t) and y(t), for t>0.
(c)When the input is zero, choose initial conditions $${x_1}\left( {{0^ + }} \right)$$ and $${x_2}\left( {{0^ + }} \right)$$ such that $$y\left( t \right) = A{e^{ - 2t}}$$ for t>0
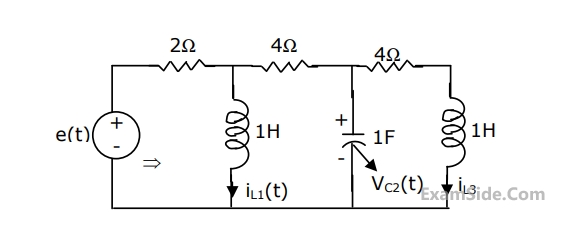
For the circuit shown in the figure, choose state variables as $${x_{1,}}{x_{2,}}{x_3}$$ to be $${i_{L1}}\left( t \right),{v_{c2}}\left( t \right),{i_{L3}}\left( t \right)$$
Wriote the state equations
$$$\left[ {\matrix{ {\mathop {{x_1}}\limits^ \bullet } \cr {\mathop {{x_2}}\limits^ \bullet } \cr {\mathop {{x_3}}\limits^ \bullet } \cr } } \right] = A\left[ {\matrix{ {{x_1}} \cr {{x_2}} \cr {{x_3}} \cr } } \right] + B\left[ {e\left( t \right)} \right]$$$