Discrete Time Signal Z Transform · Signals and Systems · GATE ECE
Marks 1
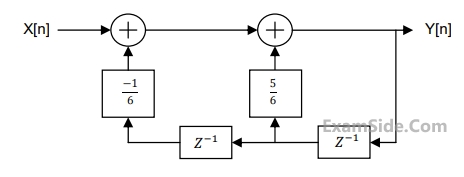
The response of a discrete time system $\mathrm{y}[\mathrm{n}]$ obeys the following relation:
$$ y[n]=\frac{5}{6} y[n-1]-\frac{1}{6} y[n-2]+x[n] . $$
The input to the system is $x[n]=\delta[n]-\frac{1}{3} \delta[n-1]$.
Which of the following options is TRUE for $y[n]$ ?
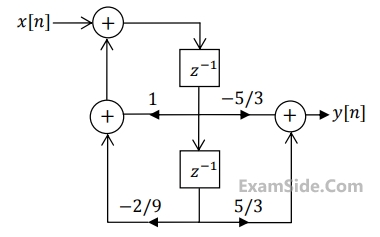
For a causal discrete-time LTI system with transfer function
$H(z) = \frac{2z^2 + 3}{\left(z + \frac{1}{3}\right)\left(z - \frac{1}{3}\right)}$
which of the following statements is/are true?
Which one of the following pole-zero plots corresponds to the transfer function of an LTI system characterized by the input-output difference equation given below?
$$ y[n]=\sum_{k=0}^3(-1)^k x[n-k] $$
$$x\left[ n \right]$$= $${a^n}u\left[ n \right] + {b^{\partial n}}u\left[ n \right]$$ , where u[n] denotes the unit step sequence and 0<$$\left| a \right| < \left| b \right| < 1.$$
The region of convergence (ROC) of the z-transform of $$\left[ n \right]$$ is
X(z)=5$${z^2} + 4{z^{ - 1}} + 3;0 < \left| z \right| < \infty $$.
The inverse z - transform x$$\,\left[ n \right]$$ is
x(n)= $${\left( {{1 \over 3}} \right)^{n}}u(n) - {\left( {{1 \over 2}} \right)^{ n}}\,u( - n - 1)$$ is
H(z) = $${z \over {z - 0.2}}$$ .
If the ROC is $$\left| {z\,} \right|$$ < 0.2, then the impulse response of the system is
Marks 2
The transfer function of a stable discrete - time LTI system is $H(z)=\frac{K(z-\alpha)}{(z+0.5)}$ where $K$ and $\alpha$ are real numbers. The value of $\alpha$ (rounded off to one decimal place) with $|\alpha|>1$, for which magnitude response of the system is constant over all frequencies, is $\_\_\_\_$ .
The initial conditions are x$$\left[ 0 \right]$$ = 1, x$$\left[ 1 \right]$$=1 and x$$\left[ n \right]$$=0 for n< 0. The value of x$$\left[ 12 \right]$$ is _____________________.

𝑦[𝑛] = 𝛼 𝑦[𝑛 − 1] + $$\beta $$ x[n].
If the impulse response h[n] of this system satisfies the condition $$\sum\limits_{n = 0}^\infty h $$[n] = 2, the relationship between α and is $$\alpha $$ and $$\beta $$ is
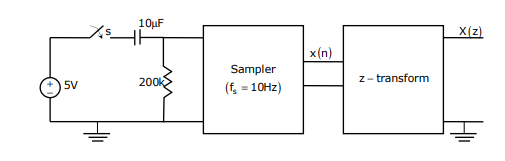
The samples x (n) (n=0, 1, 2,...........) are given by
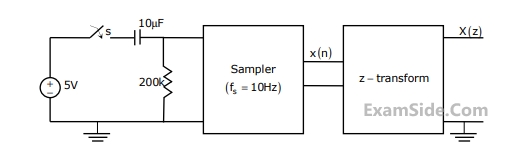
The expression and the region of convergence of the z-transform of the sampled signal are
x(nT) = $${a^n}$$, nT $$ \ge $$ 0
=0, nT<0, a> 0
gives us by