1
GATE ECE 2000
Subjective
+8
-0
For the linear, time-invariant system whose block diagram is shown in Fig.
with input x(t) and output y(t),
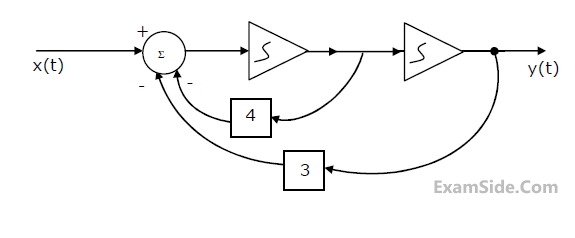
(a) Find the transfer function.
(b) For the step response of the system [i.e. find y(t) when x(t) is a unit step function and the initial conditions are zero]
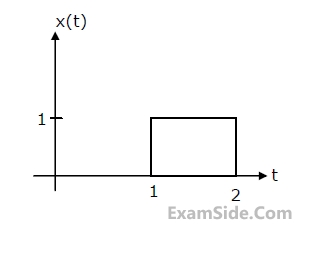
(c) Find y(t), if x(t) is as shown in Fig. and the initial conditions are zero.
(a) Find the transfer function.
(b) For the step response of the system [i.e. find y(t) when x(t) is a unit step function and the initial conditions are zero]
(c) Find y(t), if x(t) is as shown in Fig. and the initial conditions are zero.
2
GATE ECE 1992
Subjective
+8
-0
Block diagram model of a position control system is shown in figure.

(a) In absence of derivative feedback (Kt=0) , determine damping ratio of the system for amplifier gain KA=5. Also find the steady state error to unit ramp input.
(b) Find suitable values of the parameters KA and Kt so that damping ratio of the system is increased to 0.7 without affecting the steady state error as obtained in part (a).
(a) In absence of derivative feedback (Kt=0) , determine damping ratio of the system for amplifier gain KA=5. Also find the steady state error to unit ramp input.
(b) Find suitable values of the parameters KA and Kt so that damping ratio of the system is increased to 0.7 without affecting the steady state error as obtained in part (a).
GATE ECE Subjects
Browse all chapters by subject
General Aptitude
Network Theory
Microprocessors
Signals and Systems
Discrete Fourier Transform and Fast Fourier Transform Discrete Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Fourier Transform Representation of Continuous Time Signal Fourier Series Transmission of Signal Through Continuous Time LTI Systems Miscellaneous Sampling Continuous Time Linear Invariant System Discrete Time Linear Time Invariant Systems Discrete Time Signal Z Transform Transmission of Signal Through Discrete Time Lti Systems
Electromagnetics
Digital Circuits
Electronic Devices and VLSI
Control Systems
Communications
Engineering Mathematics