Root Locus Diagram · Control Systems · GATE ECE
Marks 1
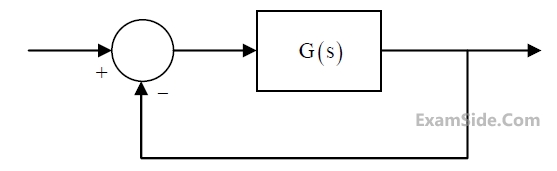
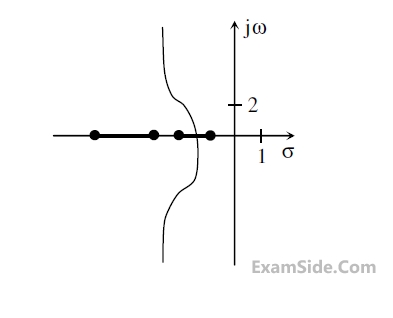
Consider the unity-negative-feedback system shown in Figure (i) below, where gain $K \geq 0$. The root locus of this system is shown in Figure (ii) below. For what value(s) of $K$ will the system in Figure (i) have a pole at $-1+j 1$ ?


The root-locus plot of a closed-loop system with unity negative feedback and transfer function KG(s) in the forward path is shown in the figure. Note that K is varied from 0 to $$\infty$$.
Select the transfer function G(s) that results in the root-locus plot of the closed-loop system as shown in the figure.

The pole-zero map of a rational function $G(s)$ is shown below. When the closed contour $\Gamma$ is mapped into $G(s)$-plane, then the mapping encircles



Marks 2
The characteristic equation of a system is
$$ s^3+3 s^2+(K+2) s+3 K=0 $$
In the root locus plot for the given system, as $K$ varies from 0 to $\infty$, the break-away or break-in point(s) lie within
For the closed loop system shown, the root locus for 0 < K < $$\infty$$ intersects the imaginary axis for K = 1.5. The closed loop system is stable for


The constant damping ratio line, for $$\xi$$ = 0.5 , intersects the root locus at point A. The distance from the origin to point A is given as 0.5. The value of K at point A is ________ .
s3 +5s2 +(K + 6)s + K =0
Where K > 0 is a scalar variable parameter. In the root loci diagram of the system the asymptotes of the root locus for large values of K meet at a point in the s-plane whose coordinates are
