Stability · Control Systems · GATE ECE
Marks 1
The complete Nyquist plot of the open-loop transfer function $G(s) H(s)$ of a feedback control system is shown in the figure.
 If $G(s) H(s)$ has one zero in the right-half of the $s$-plane, the number of poles that the closed-loop system will have in the right-half of the $s$-plane is
If $G(s) H(s)$ has one zero in the right-half of the $s$-plane, the number of poles that the closed-loop system will have in the right-half of the $s$-plane is
A unity feedback system that uses proportional - integral (PI) control is shown in the figure.
 The stability of the overall system is controlled by tuning the PI control parameters $K_p$ and $K_I$ The maximum value of $K_I$ that can be chosen so as to keep the overall system stable or, in the worst case, marginally - stable (rounded off to three decimal places) is $\_\_\_\_$
The stability of the overall system is controlled by tuning the PI control parameters $K_p$ and $K_I$ The maximum value of $K_I$ that can be chosen so as to keep the overall system stable or, in the worst case, marginally - stable (rounded off to three decimal places) is $\_\_\_\_$
The loop transfer function of a negative feedback system is
$$ G(s) H(s)=\frac{K(s+11)}{s(s+2)(s+8)} $$
The value of $K$, for which system is marginally stable, is $\_\_\_\_$ .
X: The system is stable …
Y: The system is unstable …
Z: The test breaks down …
P: … when all elements are positive
Q: … when any one element is zero
R: … when there is a change in sign of
coefficients
Marks 2
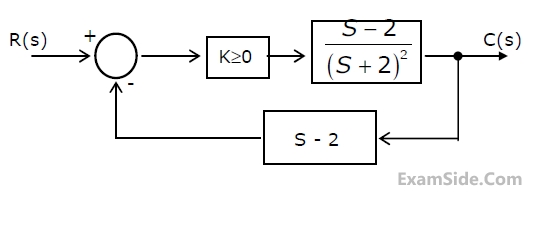
Consider the unity negative feedback control system shown in the Figure. The value of gain $K(>0)$ at which the given system will remain marginally stable is $\_\_\_\_$ . (Answer in integer)

Consider an even polynomial p(s) given by
$$p(s) = {s^4} + 5{s^2} + 4 + K$$
where K is an unknown real parameter. The complete range of K for which p(s) has all its roots on the imaginary axis is __________.
 The range of K for which the system is stable is
The range of K for which the system is stable isF(s) = s5 + 2s4 +3s3 + 6s2 - 4s - 8 = 0.The number of roots that lie strictly in the left half s-plane is _____.
 Which of the following statements is true?
Which of the following statements is true?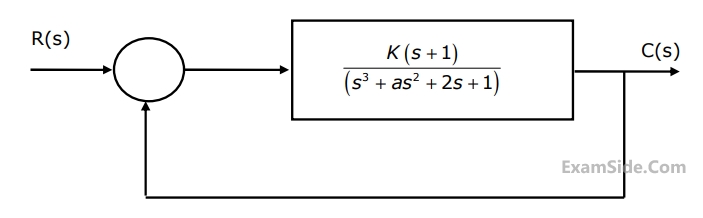
P(s) = s5 + s4 + 2s3 + 2s2 + 3s + 15 ,
the number of roots which lie in the right half of the s-plane is
q(s) = 2s5 + s4 + 4s3 + 2s2 + 2s + 1. The system is

s4 + 3s3 + 5s2 + 6s + K + 10 = 0.
The condition for stability is
Marks 5
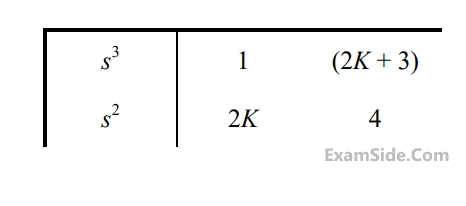
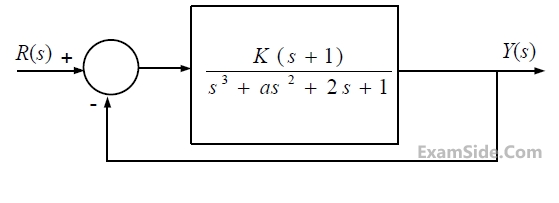
(a) Find the transfer function of the system and its characteristic equation.
(b) Use the Routh-Hurwitz criterion to determine the range of 'K' for which the system is stable.
(i) Determine the range of K for the system to be stable.
(ii) Can the system be marginally stable? If so, find the required value of K and the frequency of sustained oscillation.