1
GATE ECE 2011
MCQ (Single Correct Answer)
+2
-0.6
The input-output transfer function of a plant is h(s)=$${{100} \over {s{{\left( {s + 10} \right)}^2}}}$$. The plant is placed in a unity negative feedback configuration as shown in the figure below.
 The signal flow graph that DOES NOT model the plant transfer function H(s) is
The signal flow graph that DOES NOT model the plant transfer function H(s) is
The signal flow graph that DOES NOT model the plant transfer function H(s) is
A

B

C

D

2
GATE ECE 2011
MCQ (Single Correct Answer)
+2
-0.6
The input-output transfer function of a plant is h(s)=$${{100} \over {s{{\left( {s + 10} \right)}^2}}}$$. The plant is placed in a unity negative feedback configuration as shown in the figure below.
The gain margin of the system under closed loop unity negative feedback is
The gain margin of the system under closed loop unity negative feedback is3
GATE ECE 2009
MCQ (Single Correct Answer)
+2
-0.6
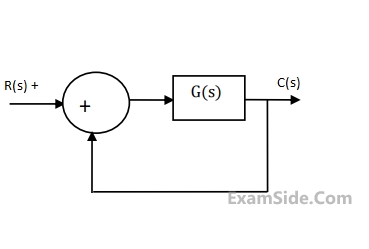
The Nyquist plot of a stable transfer function G(s) is shown in the figure. We are interested in the stability of the closed loop system in the feedback configuration shown.
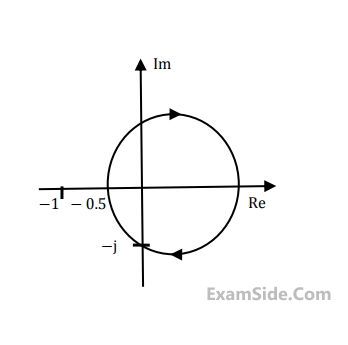 Which of the foloowing statements is true?
Which of the foloowing statements is true?
Which of the foloowing statements is true?
4
GATE ECE 2009
MCQ (Single Correct Answer)
+2
-0.6
The Nyquist plot of a stable transfer function G(s) is shown in the figure. We are interested in the stability of the closed loop system in the feedback configuration shown.
The gain and phase margins of G(s) for closed loop stability are
The gain and phase margins of G(s) for closed loop stability are GATE ECE Subjects
Browse all chapters by subject
Control Systems
Engineering Mathematics
Analog Circuits
Network Theory
Electromagnetics
Electronic Devices and VLSI
Digital Circuits
Microprocessors
Signals and Systems
Discrete Fourier Transform and Fast Fourier Transform Discrete Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Fourier Transform Representation of Continuous Time Signal Fourier Series Transmission of Signal Through Continuous Time LTI Systems Miscellaneous Sampling Continuous Time Linear Invariant System Discrete Time Linear Time Invariant Systems Discrete Time Signal Z Transform Transmission of Signal Through Discrete Time Lti Systems
Communications
General Aptitude