1
GATE ECE 2017 Set 1
Numerical
+1
-0
The open loop transfer function $$$\mathrm G\left(\mathrm s\right)\;=\;\frac{\left(\mathrm s\;+\;1\right)}{\mathrm s^\mathrm p\left(\mathrm s\;+\;2\right)\left(\mathrm s\;+\;3\right)}$$$ Where p is an integer, is connected in unity feedback configuration as shown in figure.
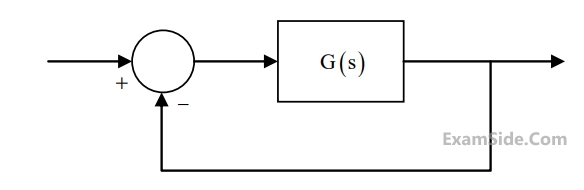 Given that the steady state error is zero for unit step input and is 6 for unit ramp input, the
value of the parameter p is _________.
Given that the steady state error is zero for unit step input and is 6 for unit ramp input, the
value of the parameter p is _________.
Given that the steady state error is zero for unit step input and is 6 for unit ramp input, the
value of the parameter p is _________.
Your input ____
2
GATE ECE 2016 Set 2
Numerical
+1
-0
The response of the system
$$G\left(s\right)\;=\;\frac{s\;-\;2}{\left(s\;+\;1\right)\left(s\;+\;3\right)}$$
to the unit step input u(t) is y(t).
The value of $$\frac{\mathrm{dy}}{\mathrm{dt}}\;\mathrm{at}\;\mathrm t\;=\;0^+\;\mathrm{is}$$ ___________.
Your input ____
3
GATE ECE 2016 Set 3
MCQ (Single Correct Answer)
+1
-0.3
For the unity feedback control system shown in the figure, the open-loop transfer function G(s) is
given as $$G\left(s\right)\;=\;\frac2{s\left(s\;+\;1\right)}$$ .The steady state error ess due to a unit step input is

4
GATE ECE 2015 Set 2
Numerical
+1
-0
A unity negative feedback system has an open–loop transfer function $$G\left(s\right)=\frac K{s\left(s+1\right)}$$.The
gain K for the system to have a damping ratio of 0.25 is _____________.
Your input ____
GATE ECE Subjects
Browse all chapters by subject
General Aptitude
Network Theory
Microprocessors
Signals and Systems
Discrete Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Fourier Transform Discrete Fourier Transform and Fast Fourier Transform Representation of Continuous Time Signal Fourier Series Discrete Time Linear Time Invariant Systems Transmission of Signal Through Continuous Time LTI Systems Transmission of Signal Through Discrete Time Lti Systems Miscellaneous Continuous Time Linear Invariant System Discrete Time Signal Z Transform Sampling
Electromagnetics
Digital Circuits
Electronic Devices and VLSI
Control Systems
Communications
Engineering Mathematics