1
GATE ECE 2012
MCQ (Single Correct Answer)
+2
-0.6
The transfer function of a compensator is given as $${G_C}(s) = {{s + a} \over {s + b}}.$$
$${G_C}(s)$$ is a lead compensator if
2
GATE ECE 2012
MCQ (Single Correct Answer)
+2
-0.6
The transfer function of a compensator is given as $${G_C}(s) = {{s + a} \over {s + b}}.$$
The phase of the above lead compensator is maximum at
3
GATE ECE 2010
MCQ (Single Correct Answer)
+2
-0.6
A unity negative feedback closed loop system has a plant with the transfer function $$G(s) = {1 \over {{s^2} + 2s + 2}}$$
and a controller $${G_c}(s)$$ in the feed forward path. For a unit set
input, the transfer function of the controller that gives minimum steady sate error is
4
GATE ECE 2008
MCQ (Single Correct Answer)
+2
-0.6
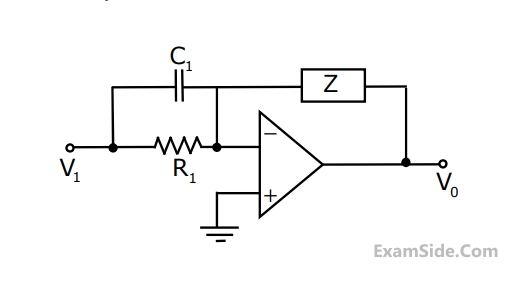
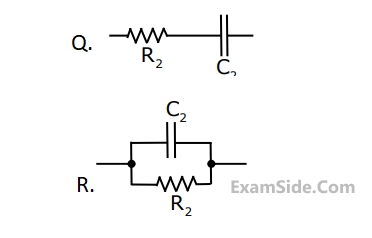
Group I gives two possible choices for the impedance Z in the diagram. The
circuit elements in Z satisfy the condition $${R_2}{C_2} > {R_1}{C_{1.}}$$ The transfer $${\textstyle{{{V_0}} \over {{V_1}}}}$$ function
represents a kind of controller. Match the impedances in Group I with the types
of controllers in Group II.
 Group - I
Group - I
Group - I
Group - II
1. PID controller
2. Lead compensator
3. Lag compensator
GATE ECE Subjects
Browse all chapters by subject
Control Systems
Engineering Mathematics
Analog Circuits
Network Theory
Electromagnetics
Electronic Devices and VLSI
Digital Circuits
Microprocessors
Signals and Systems
Discrete Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Fourier Transform Discrete Fourier Transform and Fast Fourier Transform Representation of Continuous Time Signal Fourier Series Discrete Time Linear Time Invariant Systems Transmission of Signal Through Continuous Time LTI Systems Transmission of Signal Through Discrete Time Lti Systems Miscellaneous Continuous Time Linear Invariant System Discrete Time Signal Z Transform Sampling
Communications
General Aptitude