1
GATE ECE 2006
MCQ (Single Correct Answer)
+2
-0.6
Let $$g\left( t \right){\mkern 1mu} {\mkern 1mu} \,\,\,\,\,{\mkern 1mu} = {\mkern 1mu} {\mkern 1mu} p\left( t \right){}^ * p\left( t \right)$$ where $$ * $$ denotes convolution and $$p(t) = u(t) - u(t-1)$$ with $$u(t)$$ being the unit step function
The impulse response of filter matched to the signal $$s(t) = g(t)$$ $$ - \delta {\left( {t - 2} \right)^ * }\,\,g\left( t \right)$$ is given as:
2
GATE ECE 2006
MCQ (Single Correct Answer)
+2
-0.6
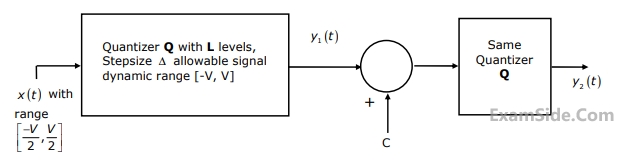
In the following figure the minimum value of the constant “C”, which is to be added to y1(t) such that y1(t) and y2(t) are different, is
3
GATE ECE 2005
MCQ (Single Correct Answer)
+2
-0.6
A symmetric three-level midtread quantizer is to be designed assuming equiprobable occurrence of all quantization levels.
The quantization noise power for the quantization region between –a and +a in the figure is
4
GATE ECE 2005
MCQ (Single Correct Answer)
+2
-0.6
A symmetric three-level midtread quantizer is to be designed assuming equiprobable occurrence of all quantization levels.
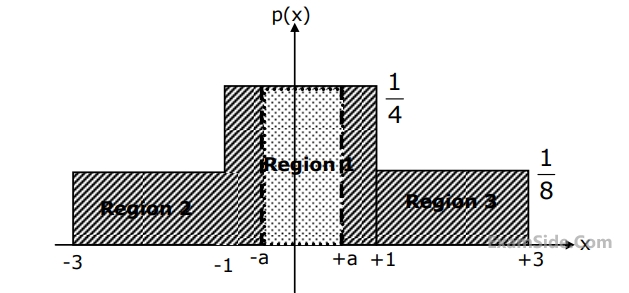
If the input probability density function is divided into three regions as shown in figure, the value of 'a' in the figure is
GATE ECE Subjects
Browse all chapters by subject
General Aptitude
Network Theory
Microprocessors
Signals and Systems
Discrete Fourier Transform and Fast Fourier Transform Discrete Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Fourier Transform Representation of Continuous Time Signal Fourier Series Transmission of Signal Through Continuous Time LTI Systems Miscellaneous Sampling Continuous Time Linear Invariant System Discrete Time Linear Time Invariant Systems Discrete Time Signal Z Transform Transmission of Signal Through Discrete Time Lti Systems
Electromagnetics
Digital Circuits
Electronic Devices and VLSI
Control Systems
Communications
Engineering Mathematics