1
GATE ECE 2010
MCQ (Single Correct Answer)
+1
-0.3
A system with the transfer function $${{Y(s)} \over {X(s)}} = {s \over {s + p}}\,\,$$ has an output
$$y(t) = \cos \left( {2t - {\pi \over 3}} \right)\,$$ for the input signal
$$x(t) = p\cos \left( {2t - {\pi \over 2}} \right)$$. Then, the system parameter 'p' is
$$y(t) = \cos \left( {2t - {\pi \over 3}} \right)\,$$ for the input signal
$$x(t) = p\cos \left( {2t - {\pi \over 2}} \right)$$. Then, the system parameter 'p' is
2
GATE ECE 2006
MCQ (Single Correct Answer)
+1
-0.3
In the system shown below,
x(t) = (sint)u(t). In steady-state, the response y(t) will be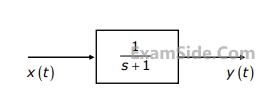
x(t) = (sint)u(t). In steady-state, the response y(t) will be
3
GATE ECE 2006
MCQ (Single Correct Answer)
+1
-0.3
A low-pass filter having a frequency response $$H(j\omega )$$ = $$A(\omega ){e^{j\Phi (\omega )}}$$, does not product any phase distortion if
4
GATE ECE 2002
MCQ (Single Correct Answer)
+1
-0.3
A linear phase channel with phase delay $${\tau _p}$$ and group delay $${\tau _g}$$ must have
GATE ECE Subjects
Browse all chapters by subject
General Aptitude
Network Theory
Microprocessors
Signals and Systems
Discrete Fourier Transform and Fast Fourier Transform Discrete Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Fourier Transform Representation of Continuous Time Signal Fourier Series Transmission of Signal Through Continuous Time LTI Systems Miscellaneous Sampling Continuous Time Linear Invariant System Discrete Time Linear Time Invariant Systems Discrete Time Signal Z Transform Transmission of Signal Through Discrete Time Lti Systems
Electromagnetics
Digital Circuits
Electronic Devices and VLSI
Control Systems
Communications
Engineering Mathematics