1
GATE ECE 2008
MCQ (Single Correct Answer)
+2
-0.6
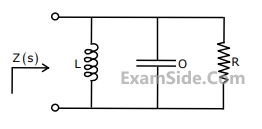
The driving point impedance of the following network is given by $$Z(s) = {{0.2\,s} \over {{s^2}\, + \,0.1\,s\, + \,2}}$$. The component values are
2
GATE ECE 2006
MCQ (Single Correct Answer)
+2
-0.6
A two-port network is represented by ABCD parameters given by
$$\left[ {\matrix{ {{V_1}} \cr {{I_1}} \cr } } \right] = \,\left[ {\matrix{ A & B \cr C & D \cr } } \right]\,\left[ {\matrix{ {{V_2}} \cr { - \,{I_2}} \cr } } \right]$$
If port-2 is terminated by $${R_L}$$, the input impedance seen at port-1 is given by
3
GATE ECE 2006
MCQ (Single Correct Answer)
+2
-0.67
In the two port network shown in the figure below, z12 and z21 are, respectively

4
GATE ECE 2005
MCQ (Single Correct Answer)
+2
-0.6
If R1 = R2 = R4 = R and R3 = 1.1R in the bridge circuit shown in figure, then the reading in the ideal voltmeter connected between a and b is

GATE ECE Subjects
Browse all chapters by subject
Control Systems
Engineering Mathematics
Analog Circuits
Network Theory
Electromagnetics
Electronic Devices and VLSI
Digital Circuits
Microprocessors
Signals and Systems
Representation of Continuous Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Discrete Time Signal Fourier Series Fourier Transform Discrete Fourier Transform and Fast Fourier Transform Discrete Time Signal Z Transform Continuous Time Linear Invariant System Discrete Time Linear Time Invariant Systems Transmission of Signal Through Continuous Time LTI Systems Sampling Transmission of Signal Through Discrete Time Lti Systems Miscellaneous
Communications
General Aptitude