1
GATE ECE 2001
Subjective
+5
-0
The Fourier transform $$G(\omega )$$ of the signal g(t) in Fig.(1) is given as
$$G(\omega ) = {1 \over {{\omega ^2}}}({e^{j\omega }} - j\omega {e^{j\omega }} - 1)$$.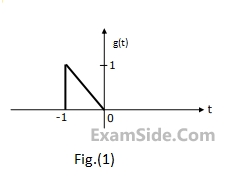
$$G(\omega ) = {1 \over {{\omega ^2}}}({e^{j\omega }} - j\omega {e^{j\omega }} - 1)$$.
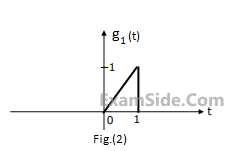
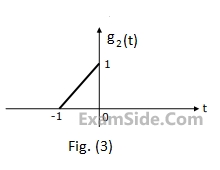
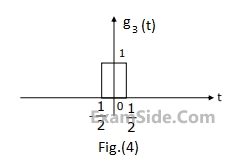
Using this information, and the time-shifting and time-scaling properties, determine and Fourier transform of signals in Fig (2), (3) and (4).
2
GATE ECE 1998
Subjective
+5
-0
Consider a rectangular pulse g(t) existing between $$t = \, - {T \over 2}\,and\,{T \over 2}$$. Find and sketch the pulse obtained by convolving g(t) with itself. The Fourier transform of g(t) is a sinc function. Write down the Fourier transform of the pulse obtained by the above convolution.
3
GATE ECE 1995
Subjective
+5
-0
A signal v(t)= [1+ m(t) ] cos $$({\omega _c}t)$$ is detected using a square law detector, having the characteristic $${v_0}(t) = {v^2}(t)$$. If the Fourier transform of m(t) is constant, $${M_0}$$, extending from - $${f_{m\,}}\,to\, + {f_{m\,}}$$, sketch the Fourier transform of $${v_0}(t)$$ in the frequency range-$${f_{m\,}}\, < f < {f_{m\,}}$$.
GATE ECE Subjects
Browse all chapters by subject
General Aptitude
Network Theory
Microprocessors
Signals and Systems
Discrete Fourier Transform and Fast Fourier Transform Discrete Time Signal Fourier Series Fourier Transform Continuous Time Signal Laplace Transform Fourier Transform Representation of Continuous Time Signal Fourier Series Transmission of Signal Through Continuous Time LTI Systems Miscellaneous Sampling Continuous Time Linear Invariant System Discrete Time Linear Time Invariant Systems Discrete Time Signal Z Transform Transmission of Signal Through Discrete Time Lti Systems
Electromagnetics
Digital Circuits
Electronic Devices and VLSI
Control Systems
Communications
Engineering Mathematics