1
GATE EE 2015 Set 2
MCQ (Single Correct Answer)
+2
-0.6
For the system governed by the set of equations:
$$$\eqalign{
& d{x_1}/dt = 2{x_1} + {x_2} + u \cr
& d{x_2}/dt = - 2{x_1} + u \cr
& \,\,\,\,\,\,y = 3{x_1} \cr} $$$
the transfer function $$Y(s)/U(s)$$ is given by
the transfer function $$Y(s)/U(s)$$ is given by
2
GATE EE 2015 Set 1
MCQ (Single Correct Answer)
+2
-0.6
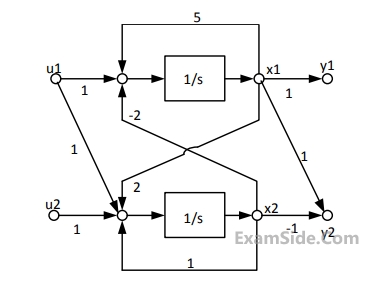
In the signal flow diagram given in the figure, $${u_1}$$ and $${u_2}$$ are possible inputs whereas $${y_1}$$ and $${y_2}$$ are possible outputs. When would the $$SISO$$ system derived from this diagram be controllable and observable?
3
GATE EE 2014 Set 2
MCQ (Single Correct Answer)
+2
-0.6
The second order dynamic system $${{dX} \over {dt}} = PX + Qu,\,\,\,y = RX$$ has the matrices $$P,Q,$$ and $$R$$ as follows: $$P = \left[ {\matrix{
{ - 1} & 1 \cr
0 & { - 3} \cr
} } \right]\,\,Q = \left[ {\matrix{
0 \cr
1 \cr
} } \right]$$
$$R = \left[ {\matrix{ 0 & 1 \cr } } \right]$$ The system has the following controllability and observability properties:
$$R = \left[ {\matrix{ 0 & 1 \cr } } \right]$$ The system has the following controllability and observability properties:
4
GATE EE 2014 Set 3
MCQ (Single Correct Answer)
+2
-0.6
Consider the system described by the following state space equations
$$$\eqalign{
& \left[ {\matrix{
{{x_1}} \cr
{{x_2}} \cr
} } \right] = \left[ {\matrix{
0 & 1 \cr
{ - 1} & { - 1} \cr
} } \right]\left[ {\matrix{
{{x_1}} \cr
{{x_2}} \cr
} } \right] + \left[ {\matrix{
0 \cr
1 \cr
} } \right]u; \cr
& y = \left[ {\matrix{
1 & 0 \cr
} } \right]\left[ {\matrix{
{{x_1}} \cr
{{x_2}} \cr
} } \right] \cr} $$$
If $$u$$ unit step input, then the steady state error of the system is
GATE EE Subjects
Browse all chapters by subject
Electric Circuits
Electromagnetic Fields
Signals and Systems
Electrical Machines
Engineering Mathematics
General Aptitude
Power System Analysis
Electrical and Electronics Measurement
Analog Electronics
Control Systems
Power Electronics