State Variable Analysis · Control Systems · GATE EE
Marks 1
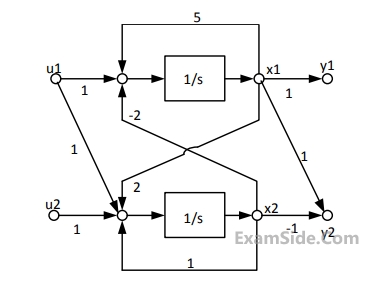
Transfer function $$G(s)$$ of the system is

Marks 2
A system is characterized by the following state equation and output equation ( $u$ : input,
$x$ : state vector, $y$ : output)
$$ \begin{aligned} & \dot{x}=\left[\begin{array}{cc} a & b \\ -a & 0 \end{array}\right] x+\left[\begin{array}{l} 1 \\ 0 \end{array}\right] u \\ & y=\left[\begin{array}{ll} 1 & 2 \end{array}\right] x \end{aligned} $$
What are the values of $a$ and $b$ for which the poles of the transfer function are at $-2+j 3$ and $-2-\beta$ ?
A system is represented in state-space form as follows:
(u: input, $x$ : state vector, $y$ : output)
$$ \begin{aligned} & \dot{x}=\left[\begin{array}{cc} 1 & 2 \\ -3 & 0 \end{array}\right] x+\left[\begin{array}{l} 1 \\ 2 \end{array}\right] u \\ & y=\left[\begin{array}{ll} 1 & 2 \end{array}\right] x \end{aligned} $$
Consider the new state vector $z=\left[\begin{array}{cc}2 & 1 \\ -1 & 0\end{array}\right] x$
What is the state-space representation of the system in terms of the new state vector $z$ ?
Consider the state-space description of an LTI system with matrices
$$A = \left[ {\matrix{ 0 & 1 \cr { - 1} & { - 2} \cr } } \right],B = \left[ {\matrix{ 0 \cr 1 \cr } } \right],C = \left[ {\matrix{ 3 & { - 2} \cr } } \right],D = 1$$
For the input, $$\sin (\omega t),\omega > 0$$, the value of $$\omega$$ for which the steady-state output of the system will be zero, is ___________ (Round off to the nearest integer).
$$ \text { The state space representation of a first-order system is given as } $$
$$ \begin{aligned} & \dot{x}=-x+u \\ & y=x \end{aligned} $$
Where, $x$ is the state variable, $u$ is the control input and $y$ is the controlled output. Let $u=-k x$ be the control law, where $K$ is the controller gain. To place a closed loop pole at -2 , the value of $k$ is $\_\_\_\_$
$$\eqalign{ & \left[ {\matrix{ {\mathop {{x_1}}\limits^ \bullet \left( t \right)} \cr {\mathop {{x_2}}\limits^ \bullet \left( t \right)} \cr } } \right] = \left[ {\matrix{ 0 & 1 \cr 0 & { - 2} \cr } } \right]\left[ {\matrix{ {{x_1}\left( t \right)} \cr {{x_2}\left( t \right)} \cr } } \right] + \left[ {\matrix{ 0 \cr 1 \cr } } \right]u\left( t \right) \cr & y\left( t \right) = \left[ {\matrix{ 1 & 0 \cr } } \right]\left[ {\matrix{ {{x_1}\left( t \right)} \cr {{x_2}\left( t \right)} \cr } } \right] \cr} $$
If $$u(t)$$ is a unit step input and $$\left[ {\matrix{ {{x_1}\left( 0 \right)} \cr {{x_2}\left( 0 \right)} \cr } } \right] = \left[ {\matrix{ 1 \cr 0 \cr } } \right],$$ the value of output $$y(t)$$ at $$t=1$$ sec (rounded off to three decimal places) is _____________.
$$\eqalign{ & \left[ {\matrix{ {\mathop {{x_1}}\limits^ \bullet \left( t \right)} \cr {\mathop {{x_2}}\limits^ \bullet \left( t \right)} \cr } } \right] = \left[ {\matrix{ 1 & 2 \cr 2 & 0 \cr } } \right]\left[ {\matrix{ {{x_1}\left( t \right)} \cr {{x_2}\left( t \right)} \cr } } \right] + \left[ {\matrix{ 1 \cr 2 \cr } } \right]u\left( t \right) \cr & y\left( t \right) = \left[ {\matrix{ 1 & 0 \cr } } \right]\left[ {\matrix{ {{x_1}\left( t \right)} \cr {{x_2}\left( t \right)} \cr } } \right] \cr} $$
$$\mathop x\limits^ \bullet \left( t \right) = \left[ {\matrix{ 1 & 0 \cr 0 & 2 \cr } } \right]\,\,x\left( t \right),\,\,y\left( t \right) = {c^T}x\left( t \right),\,c = \left[ {\matrix{ 1 \cr 1 \cr } } \right]$$ and
$$x\left( 0 \right) = \left[ {\matrix{ 1 \cr 1 \cr } } \right]$$
The value of $$y(t)$$ for $$t\,\,\, = \,\,{\log _e}2$$ ___________.
the transfer function $$Y(s)/U(s)$$ is given by
$$R = \left[ {\matrix{ 0 & 1 \cr } } \right]$$ The system has the following controllability and observability properties:
If $$u$$ unit step input, then the steady state error of the system is
$$\left[ {\matrix{ {\mathop {{x_1}}\limits^ \bullet } \cr {\mathop {{x_2}}\limits^ \bullet } \cr } } \right] = \left[ {\matrix{ { - 2} & 0 \cr 0 & { - 1} \cr } } \right]\left[ {\matrix{ {{x_1}} \cr {{x_2}} \cr } } \right] + \left[ {\matrix{ 1 \cr 1 \cr } } \right]u,\,\,{x_1}\left( 0 \right) = 0,$$
$${x_2}\left( 0 \right) = 0$$ and $$y = \left[ {\matrix{ 1 & 0 \cr } } \right]\left[ {\matrix{ {{x_1}} \cr {{x_2}} \cr } } \right]$$
The response $$y(t)$$ to a unit step input is
$$\left[ {\matrix{ {\mathop {{x_1}}\limits^ \bullet } \cr {\mathop {{x_2}}\limits^ \bullet } \cr } } \right] = \left[ {\matrix{ { - 2} & 0 \cr 0 & { - 1} \cr } } \right]\left[ {\matrix{ {{x_1}} \cr {{x_2}} \cr } } \right] + \left[ {\matrix{ 1 \cr 1 \cr } } \right]u,\,\,{x_1}\left( 0 \right) = 0,$$
$${x_2}\left( 0 \right) = 0$$ and $$y = \left[ {\matrix{ 1 & 0 \cr } } \right]\left[ {\matrix{ {{x_1}} \cr {{x_2}} \cr } } \right]$$
The system is
where $$y$$ is the output and $$u$$ is the input. The system is controllable for
$$y\left( t \right) = {x_1}\left( t \right)$$ when $$u(t)$$ is the input and $$y(t)$$ is the output
The state $$-$$ transition matrix of the above system is
$$y\left( t \right) = {x_1}\left( t \right)$$ when $$u(t)$$ is the input and $$y(t)$$ is the output
The system transfer function is
The transfer function $$G(s)$$ of this system will be
A unity feedback is provided to the above system $$G(s)$$ to make it a closed loop system as shown in figure.

For a unit step input $$r(t),$$ the steady state error in the input will be
$$\mathop X\limits^ \bullet \left( t \right) = \left( {\matrix{ 0 & 1 \cr 0 & { - 3} \cr } } \right)X\left( t \right) + \left( {\matrix{ 1 \cr 0 \cr } } \right)u\left( t \right)$$ with the initial condition $$X\left( 0 \right) = {\left[ { - 1\,\,3} \right]^T}$$ and the unit step input $$u(t)$$ has
The state transition matrix
$$\mathop X\limits^ \bullet \left( t \right) = \left( {\matrix{ 0 & 1 \cr 0 & { - 3} \cr } } \right)X\left( t \right) + \left( {\matrix{ 1 \cr 0 \cr } } \right)u\left( t \right)$$ with the initial condition $$X\left( 0 \right) = {\left[ { - 1\,\,3} \right]^T}$$ and the unit step input $$u(t)$$ has
The state transition equation
The above equation may be organized in the state space form as follows
$$\left( {\matrix{
{{{{d^2}\omega } \over {d{t^2}}}} \cr
{{{d\omega } \over {dt}}} \cr
} } \right) = P\left( {\matrix{
{{{d\omega } \over {dt}}} \cr
\omega \cr
} } \right) + Q{V_a}$$
where the $$P$$ matrix is given by
Marks 5
Given : $${e^{AT}} = \left[ {\matrix{ {{e^{ - t}} + t{e^{ - t}}} & {t{e^{ - t}}} \cr { - t{e^{ - t}}} & {{e^{ - t}} - t{e^{ - t}}} \cr } } \right]$$
(a) Find a set of states $${x_1}\left( 1 \right)$$ and $${x_2}\left( 1 \right)$$ such that $${x_1}\left( 2 \right) = 2.$$
(b) Show that $$\,{\left( {s{\rm I} - A} \right)^{ - t}} = \Phi \left( s \right) = {1 \over \Delta }\left[ {\matrix{
{s + 2} & 1 \cr
{ - 1} & s \cr
} } \right];$$ $$\Delta = {\left( {s + 1} \right)^2}$$
(c) From $$\Phi \left( s \right),$$ find the matrix $$A$$.
Find the Laplace transform of the state transistion matrix. Find also the value of $${x_1}$$ at $$t=1$$ if $${x_1}\left( 0 \right) = 1$$ and $${x_2}\left( 0 \right) = 0.$$
$$\eqalign{ & X = \left[ {\matrix{ 0 & 1 & 0 \cr 0 & 0 & 1 \cr { - 40} & { - 44} & { - 14} \cr } } \right]x + \left[ {\matrix{ 0 \cr 1 \cr 0 \cr } } \right]u \cr & y = \left[ {\matrix{ 0 & 1 & 0 \cr } } \right]x \cr} $$