1
GATE ME 2004
MCQ (Single Correct Answer)
+2
-0.6
Match the following with respect to spatial mechanism.
Type of Joint
$$P.$$ Revolute
$$Q.$$ Cylindrical
$$R.$$ Spherical
Motion constrained
$$1.$$ Three
$$2.$$ Five
$$3.$$ Four
$$4.$$ Two
$$5.$$ Zero
2
GATE ME 2004
MCQ (Single Correct Answer)
+2
-0.6
The figure below shows a planar mechanism with single degree of freedom. The instant center $${{\rm I}_{24}}$$ for the given configuration is located at a position.

3
GATE ME 2003
MCQ (Single Correct Answer)
+2
-0.6
The circular disc shown in its plan view in the figure rotates in a plane parallel to the horizontal plane about the point $$O$$ at a uniform angular velocity $$\omega $$. Two other points $$A$$ and $$B$$ are located on the line $$OZ$$ at distances $${r_A}$$ and $${r_B}$$ from $$O$$ respectively.
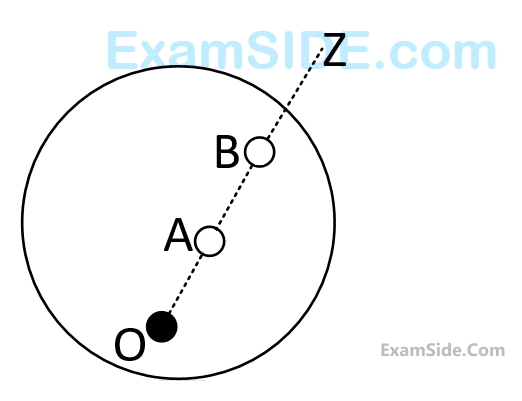
The velocity of point $$B$$ with respect to point $$A$$ is a vector of magnitude
4
GATE ME 2003
MCQ (Single Correct Answer)
+2
-0.6
The circular disc shown in its plan view in the figure rotates in a plane parallel to the horizontal plane about the point $$O$$ at a uniform angular velocity $$\omega $$. Two other points $$A$$ and $$B$$ are located on the line $$OZ$$ at distances $${r_A}$$ and $${r_B}$$ from $$O$$ respectively.
The acceleration of point $$B$$ with respect to point $$A$$ is a vector of magnitude
GATE ME Subjects
Browse all chapters by subject
Theory of Machines
Engineering Mechanics
Production Engineering
Strength of Materials
Turbo Machinery
Engineering Mathematics
Machine Design
Heat Transfer
Industrial Engineering
Thermodynamics
General Aptitude