Analysis of Plane Mechanisms · Theory of Machines · GATE ME
Marks 1
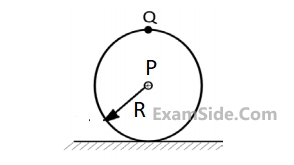
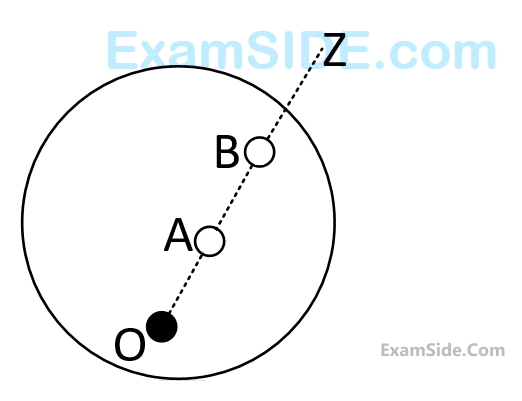
A rigid circular disc of radius $r$ (in m ) is rolling without slipping on a flat surface as shown in the figure below. The angular velocity of the disc is $\omega$ (in rad s-1). The velocities (in $\mathrm{m} \mathrm{s}^{-1}$ ) at points O and A , respectively, are

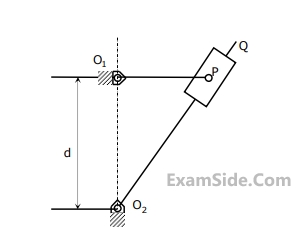
The figure shows a schematic of a simple Watt governor mechanism with the spindle O1O2 rotating at an angular velocity ω about a vertical axis. The balls at P and S have equal mass. Assume that there is no friction anywhere and all other components are massless and rigid. The vertical distance between the horizontal plane of rotation of the balls and the pivot O1 is denoted by h. The value of h = 400 mm at a certain ω. If ω is doubled, the value of h will be _________ mm.



Which one of the following is TRUE?



($$I.$$) $$\,\,\,$$ Mating spur gear teeth is an example of higher pair
($$II.$$) $$\,\,\,$$ A revolute joint is an example of lower pair.
Indicate the correct answer.

Note : $$All$$ $$dimensions$$ $$are$$ $$in$$ $$mm$$



Marks 2
An offset slider-crank mechanism is shown in the figure below. The length of the stroke of the slider is ________ mm (rounded off to nearest integer).

At the instant when OP is vertical and AP is horizontal, the link OD is rotating counter clockwise at a constant rate ω = 7 rad/s. Pin P on link OD slides in the slot BC of link ABC which is hinged at A, and causes a clockwise rotation of the link ABC. The magnitude of angular velocity of link ABC for this instant is _________ rad/s (rounded off to 2 decimal places).

The figure shows a wheel rolling without slipping on a horizontal plane with angular velocity 𝜔1. A rigid bar PQ is pinned to the wheel at P while the end Q slides on the floor.
What is the angular velocity 𝜔2 of the bar PQ?

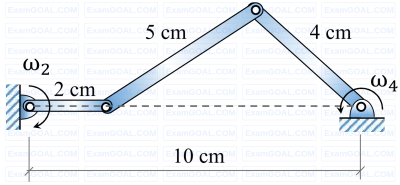
In the configuration of the planar four-bar mechanism at a certain instant as shown in the figure, the angular velocity of the 2 cm long link is ω2 = 5 rad/s. Given the dimensions as shown, the magnitude of the angular velocity ω4 of the 4 cm long link is given by rad/s (round off to 2 decimal places).
A planar four-bar linkage mechanism with 3 revolute kinematic pairs and 1 prismatic kinematic pair is shown in the figure, where AB ⊥ CE and FD ⊥ CE. The T-shaped link CDEF is constructed such that the slider B can cross the point D, and CE is sufficiently long. For the given lengths as shown, the mechanism is









Analysis
$$P.$$ Continuous relative rotation
$$Q.$$ Velocity and acceleration
$$R.$$ Mobility
$$S.$$ Dynamic - static analysis
Approach
$$1.$$ D' Alembert's principal
$$2.$$ Grubler's criterion
$$3.$$ Grashoff's law
$$4.$$ Kennedy's theorem

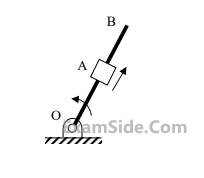
The angular speed of PQ in rev/s when the block R attains maximum speed during forward stroke (stroke with slower speed) is

If the quick return ratio is $$1:2$$, then the length of the crank in mm is
List $$I$$
$$P.$$ Higher kinematic pair
$$Q.$$ Lower kinematic pair
$$R.$$ Quick return mechanism
$$S.$$ Mobility of a linkage
List $$II$$
$$1.$$ Grubler's equation
$$2.$$ Line contact
$$3.$$ Euler's equation
$$4.$$ planar
$$5.$$ Shaper
$$6.$$ Surface contact

At the instant considered, what is the magnitude of the angular velocity of $${O_4}B?$$
At the same instant, if the component of the force at joint $$A$$ along $$AB$$ is $$30 N,$$ then the magnitude of the joint reaction at $${Q_2}$$.
Which kind of $$4$$-bar mechanism is $${Q_2}AB{O_4}?$$

Type of Mechanism
$$P.$$ Scott - Russel mechanism
$$Q.$$ Geneva mechanism
$$R.$$ Off-set slider- crank mechanism
$$S.$$ Scotch Yoke mechanism
Motion achieved
$$1.$$ Intermittent motion
$$2.$$ Quick return motion
$$3.$$ Simple harmonic motion
$$4.$$ Straight line motion
Type of Joint
$$P.$$ Revolute
$$Q.$$ Cylindrical
$$R.$$ Spherical
Motion constrained
$$1.$$ Three
$$2.$$ Five
$$3.$$ Four
$$4.$$ Two
$$5.$$ Zero

The acceleration of point $$B$$ with respect to point $$A$$ is a vector of magnitude
The velocity of point $$B$$ with respect to point $$A$$ is a vector of magnitude



