1
GATE EE 2012
MCQ (Single Correct Answer)
+2
-0.6
L et y[n] denote the convolution of h[n] and g[n], where $$h\left[n\right]=\left(1/2\right)^nu\left[n\right]$$ and g[n] is a causal
sequence. If y[0] = 1 and y[1] = 1/2, then g[1] equals
2
GATE EE 2012
MCQ (Single Correct Answer)
+2
-0.6
The input x(t) and output y(t) of a system are related as $$\int_{-\infty}^tx\left(\tau\right)\cos\left(3\tau\right)d\tau$$.The system is
3
GATE EE 2011
MCQ (Single Correct Answer)
+2
-0.6
The response h(t) of a linear time invariant system to an impulse $$\delta\left(t\right)$$, under
initially relaxed condition is $$h\left(t\right)=e^{-t}\;+\;e^{-2t}$$. The response of this system for a
unit step input u(t) is
4
GATE EE 2010
MCQ (Single Correct Answer)
+2
-0.6
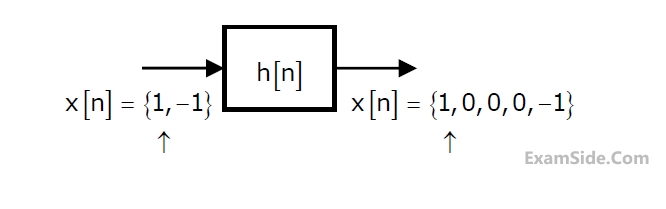
Given the finite length input x[n] and the corresponding finite length output y[n]
of an LTI system as shown below, the impulse response h[n] of the system is
GATE EE Subjects
Browse all chapters by subject
Electric Circuits
Electrical Machines
Engineering Mathematics
Signals and Systems
Power Electronics
Power System Analysis
Digital Electronics
Analog Electronics
Electromagnetic Fields
Control Systems
Electrical and Electronics Measurement
General Aptitude